Related products
-

Gecko
Direct, quick and reliable characterization of defects on vertical honeycomb repaired structures for assuring structural safety
-
Line View
Cost-effective easy-to-use device for quick and accurate gaps / flushes inspections above 1mm
-

-
-
In-line Infusion Monitoring
Testia’s In-line Infusion Monitoring is leading the way to fully automated composite processes
(more…) -
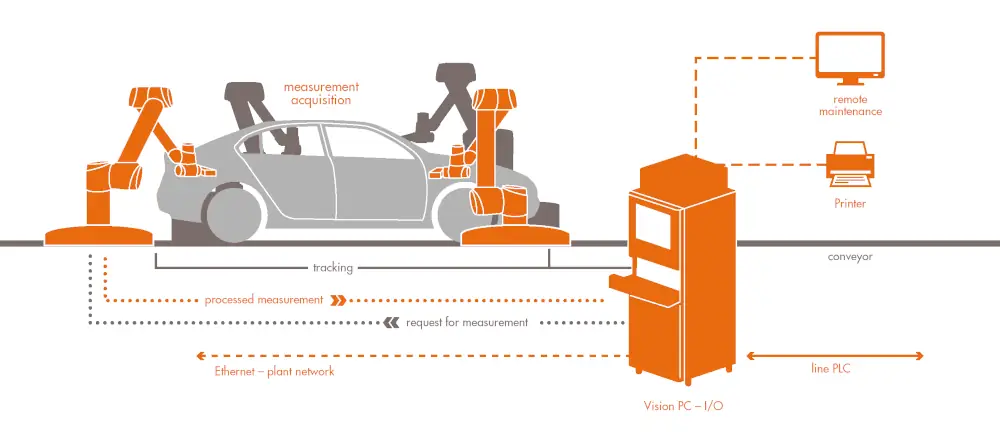
UT inspection systems
Testia can implement the right customized or off-the-shelf solution that will bring you the optimal quality, productivity and Return of Investment. (more…)