Productos relacionados
-

-
Smart Scan
Escáner configurable para una adquisición fácil y precisa con alta rentabilidad. (más…)
-

-
-
-
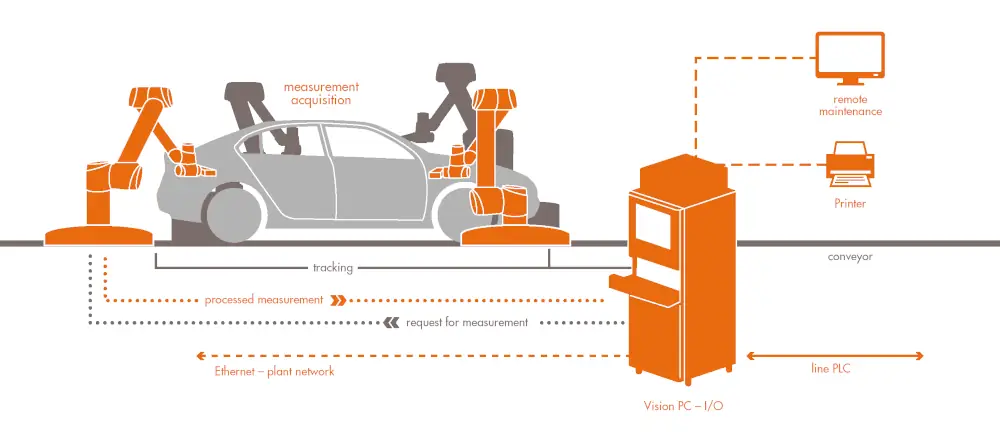
Sistemas de inspección de UT
Testia puede implantar la solución adecuada, personalizada o en serie, que le proporcionará la calidad, productividad y un rendimiento óptimo.
(más…)